
izdelki kategorija
- FM oddajnik
- 0-50w 50w-1000w 2kw-10kw 10kw +
- TV oddajnik
- 0-50w 50-1kw 2kw-10kw
- FM antene
- TV Antenna
- Antenna pripomočki
- Cable priključek moč Splitter Dummy Load
- RF Transistor
- Napajanje
- avdio oprema
- DTV Front End oprema
- Link sistem
- STL sistem Sistem Mikrovalovna Link
- FM radio
- power Meter
- Ostali izdelki
- Posebno za koronavirus
izdelki Oznake
Fmuser strani
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> afrikanščina
- sq.fmuser.net -> albanski
- ar.fmuser.net -> arabščina
- hy.fmuser.net -> Armenščina
- az.fmuser.net -> azerbajdžanski
- eu.fmuser.net -> baskovščina
- be.fmuser.net -> belorusko
- bg.fmuser.net -> bolgarščina
- ca.fmuser.net -> katalonščina
- zh-CN.fmuser.net -> kitajščina (poenostavljena)
- zh-TW.fmuser.net -> kitajščina (tradicionalno)
- hr.fmuser.net -> hrvaški
- cs.fmuser.net -> češčina
- da.fmuser.net -> danski
- nl.fmuser.net -> nizozemščina
- et.fmuser.net -> estonščina
- tl.fmuser.net -> filipinsko
- fi.fmuser.net -> finski
- fr.fmuser.net -> francosko
- gl.fmuser.net -> galicijščina
- ka.fmuser.net -> gruzijski
- de.fmuser.net -> nemščina
- el.fmuser.net -> grščina
- ht.fmuser.net -> haitijska kreolščina
- iw.fmuser.net -> hebrejščina
- hi.fmuser.net -> hindujščina
- hu.fmuser.net -> madžarščina
- is.fmuser.net -> islandski
- id.fmuser.net -> indonezijski
- ga.fmuser.net -> irski
- it.fmuser.net -> italijanščina
- ja.fmuser.net -> japonski
- ko.fmuser.net -> korejski
- lv.fmuser.net -> latvijski
- lt.fmuser.net -> litovščina
- mk.fmuser.net -> makedonščina
- ms.fmuser.net -> malajščina
- mt.fmuser.net -> malteščina
- no.fmuser.net -> norveščina
- fa.fmuser.net -> perzijski
- pl.fmuser.net -> poljščina
- pt.fmuser.net -> portugalščina
- ro.fmuser.net -> romunščina
- ru.fmuser.net -> ruščina
- sr.fmuser.net -> srbščina
- sk.fmuser.net -> slovaški
- sl.fmuser.net -> slovenščina
- es.fmuser.net -> španščina
- sw.fmuser.net -> svahili
- sv.fmuser.net -> švedščina
- th.fmuser.net -> tajska
- tr.fmuser.net -> turški
- uk.fmuser.net -> ukrajinski
- ur.fmuser.net -> urdujščina
- vi.fmuser.net -> Vietnamščina
- cy.fmuser.net -> valižanščina
- yi.fmuser.net -> jidiš
Razlika med absolutnimi in postopnimi dajalniki?
V tem članku bomo razpravljali o različnih vrstah kodrov in kateri dajalnik se lahko uporablja za katero funkcijo.
V prejšnji lekciji smo razpravljali, kaj je Encoder in kako ga je mogoče implementirati v aplikacijo. V tem članku bomo obravnavali razliko med dajalniki Absolute in Incremental in kateri se lahko uporablja za katero funkcijo.
Vrste in tehnologije dajalnikov
Obstaja veliko vrst kodrov, vendar v bistvu spadajo v dve glavni tehniki zaznavanja. To so:
- Linearno
- Rotacijski
Znotraj teh kategorij obstajajo različne vrste meritev dajalnikov, kot so:
- absolutno
- naraščajoče
Obstajajo tudi različne elektromehanske tehnologije, kot so:
- Magnetni
- Optično
- Induktivni
- Zmogljiv
- Laser
Obstaja veliko informacij o kodirnikih in morda se vam zdi, da bi si težko ovili glavo.
Opisi, kot so rotacijski ali linearni, optični in magnetni, absolutni in postopni.
Dotaknili smo se nekaj osnov, ki vam bodo pomagale razumeti, kaj in zakaj.
Najprej nekoliko razčlenimo te kategorije in razložimo par številnih konfiguracij.
1. Linearni dajalnik
Najprej Linearni Dajalnik uporablja merilnik za merjenje razdalje med dvema točkama. Ti dajalniki lahko uporabljajo palico ali kabel, ki poteka med pretvornikom dajalnika in predmetom, ki se meri za gibanje.
Ko se objekt premika, podatki pretvornika, zbrani iz palice ali kabla, ustvarijo izhodni signal, ki je linearen glede na premikanje predmeta.
Ko se meri razdalja, linearni dajalnik te podatke uporabi za določitev položaja predmeta.
Primer uporabe linearnega dajalnika je CNC rezkalni stroj, kjer so za natančnost izdelave potrebne natančne meritve gibanja.
Linearni dajalniki so lahko "absolutni" ali "povečani". Absolutne in inkrementalne meritve se bomo dotaknili nekoliko kasneje v tem članku.
2. Vrtljivi (gredni) dajalnik
Rotacijski dajalnik zbira podatke in zagotavlja povratne informacije na podlagi vrtenja predmeta ali z drugimi besedami vrteče se naprave.
Rotacijski dajalniki se včasih imenujejo "dajalniki gredi". Ta vrsta dajalnika lahko na podlagi vrtenja gredi pretvori kotni položaj ali gibanje predmeta, odvisno od uporabljene vrste merjenja.
"Absolutni rotacijski dajalniki" lahko merijo kotne položaje, medtem ko "Inkrementalni rotacijski dajalniki" lahko merijo stvari, kot so razdalja, hitrost in položaj.
Rotacijski dajalniki so uporabljeni na najrazličnejših področjih uporabe, kot so računalniške naprave za vnos, kot so miši in sledilne kroglice, pa tudi robotika.
Rotorji ali dajalniki gredi, kot je bilo že omenjeno, so lahko "absolutni" ali "povečani".
3. Dajalnik položaja
Naslednji dajalnik, ki je dajalnik položaja, se uporablja za določanje mehanskega položaja predmeta. Ta mehanski položaj je "absolutni položaj".
Uporabljajo se lahko tudi za določitev spremembe položaja med dajalnikom in objektom. Sprememba položaja glede na predmet in dajalnik bi bila dodatna sprememba.
Pozicijski dajalniki se v industrijski areni pogosto uporabljajo za zaznavanje položaja orodja in večosnega pozicioniranja.
Dajalnik položaja je lahko tudi absolutni ali naraščajoči.
4. Optični dajalnik
"Optični" dajalniki interpretirajo podatke v svetlobnih impulzih, ki jih lahko nato uporabimo za določanje stvari, kot so položaj, smer in hitrost.
Gred vrti disk z neprozornimi segmenti, ki predstavljajo določen vzorec. Ti dajalniki lahko določijo gibanje predmeta za uporabo v „vrtljivih“ ali „gredih“, medtem ko določajo natančen položaj v „linearnih“ funkcijah.
Optični dajalniki se uporabljajo v različnih aplikacijah, kot so tiskalniki, CNC rezkalni stroji in robotika.
Spet so lahko ti dajalniki absolutni ali povečani.
Po razlagi glavnih skupin boste morda videli vzorec.
Vsi dajalniki v bistvu naredijo isto stvar, proizvedejo električni signal, ki ga je nato mogoče prevesti v položaj, hitrost, kot itd.
Absolutni Encoder vs. Incremental Encoder
Zdaj, ko smo razčlenili glavne skupine, razpravimo o razliki med absolutnimi in inkremencialnimi meritvami.
Za razpravo o razliki med absolutnimi in inkrementalnimi meritvami bomo kot primer uporabili vrsto rotacijskega dajalnika.
V rotacijskem dajalniku tipa „Absolute“ se v povezavi s stacionarno napravo za dvigovanje uporablja režen disk na gredi. Ko se gred vrti, nastane edinstven kodni vzorec. To pomeni, da ima vsak položaj gredi vzorec in ta vzorec se uporablja za določitev točnega položaja.
Če se je napajanje dajalnika izgubilo in gred zavrtela, se ob nadaljevanju napajanja dajalnik beleži absolutni položaj, kot je prikazano z edinstvenim vzorcem, ki ga je prejel disk in ga je prejel prevzem.
Ta vrsta merjenja je prednostna v aplikacijah, ki zahtevajo veliko stopnjo gotovosti, na primer, ko je varnost primarna. Ker dajalnik ves čas pozna svoj dokončni položaj, ki temelji na edinstvenem izdelanem vzorcu.
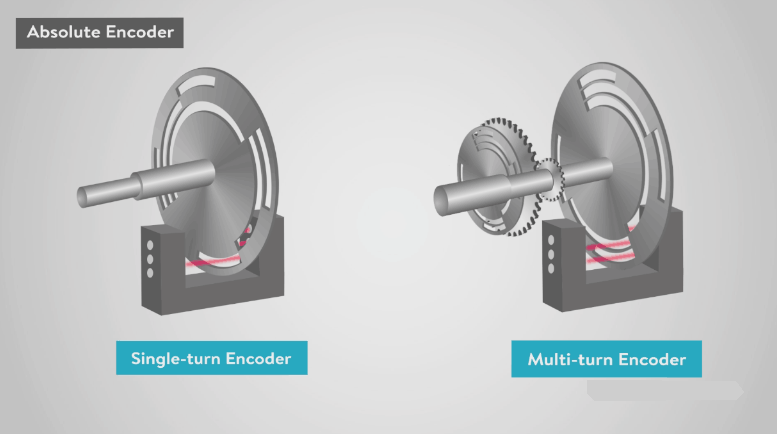
Absolutni merilni dajalniki so lahko
- Enotni obrat
or
- Več obratov
Enodirni dajalniki se uporabljajo za meritve na kratkih razdaljah, medtem ko bi bili "večogibni" bolj primerni za daljše razdalje in zahtevnejše zahteve za pozicioniranje.
Pri dajalcih inkrementalnih mer se izhodni signal ustvari vsakič, ko gred zavrti izmerjeno količino. Nato se izhodni signal razlaga na podlagi števila signalov na vrt.
Postopni dajalnik pri vklopu začne šteti nič. Za razliko od absolutnega dajalnika ni nobenih zaščitnih ukrepov glede položaja.
Ker inkrementalni dajalnik pri zagonu ali motenju napajanja začne šteti nič, je treba določiti referenčno točko za vse naloge, ki zahtevajo določanje položaja.
Dajalniki pri štetju aplikacij
V prejšnjem članku je pri opisu uporabe dajalnika za štetje ta primer dober primer inkrementalnega dajalnika.
Predpostavimo, da napajanje ni bilo moteno in ste vklopili tekoči trak ter napravo postavili v nastavitveni način.
Ko se dajalnik obrača, krmilnik sprejema štetja. Recimo, da je območje štetja od 0 do 10000.
To je inkrementalni dajalnik, zato absolutni položaj ni znan, vemo le, da popolna vrtilnost gredi šteje 10000.
Predmet postavimo na transporter in takoj, ko vhodni senzor foto-očesa zazna objekt, se zajame trenutno število dajalnikov. Recimo, da je ta številka 5232.
Nato bomo zajeli štetje s predmetom, ki izstopa in ga zazna izhodno foto-oko. Rekli bomo, da je število 6311. Torej za določitev števila celotnih potovanj odštejemo 5232 od 6311 in ugotovimo, da je potuje predmet 1079.
Po tem primeru je očitno, da ne poznamo absolutne lokacije predmeta, vemo le, da je število potovanj od vhoda do izhoda 1079.
To nam ne pove, da je predmet tri centimetre od izhoda, samo vstopa itd.
samo vemo, da bo predmet vnesen, štetje bo zajeto in predmet bo izstopil in spet, štetje ujeto.
V primeru, da nismo videli predmeta, ki izstopa v okviru dovoljenega števila potovanj, plus ali minus mrtvi pas, bo stroj pokvaril in postopek se bo ustavil.
Obstaja veliko, veliko različic kodrov, in lahko gremo več ur o različnih vrstah.
Upajmo, da smo vam dali osnovno razumevanje, kaj je tam in kdaj boste morda želeli izbrati eno določeno vrsto.
